คุณสมบัติของโค้ดสำหรับ Arduino และวงจร
- วงจรทำงานโดยใช้ระดับแรงดันสำหรับ I/O ที่ 5V เท่านั้น
- มีปุ่มกด 3 ปุ่ม (ให้ชื่อว่า R, G, B) ทำงานแบบ Pull-up (active-low) ให้ต่อวงจรปุ่มกดเอง เพื่อใช้งานกับบอร์ด Arduino
- มีเอาต์พุต 3 ขา ต่อกับวงจร RGB LED (จะใช้แบบ Common-Anode หรือ Common-Cathode ก็ได้) พร้อมตัวต้านทานจำกัดกระแส 3 ตัว
- เขียนโค้ดด้วยภาษา C++ สำหรับ Arduino เพื่อสร้าง Class ที่มีชื่อว่า "RGB_LED"
- กำหนดให้ constructor สำหรับคลาส RGB_LED เป็นดังนี้
- RGB_LED( int red_pin, int_green_pin, int blue_pin );
- โดยรับค่ามาเป็นหมายเลขของ I/O pins สำหรับ 3 ขาของ Arduino ที่จะถูกใช้งานเป็นเอาต์พุตแบบ PWM - มีเมธอดอย่างเช่น - void setRed( int duty_cycle ), void setGreen( int duty_cycle ),
- void setBlue( int duty_cycle ) เพื่อใช้กำหนดค่า duty cycle ของขาเอาต์พุต PWM และใช้ในการกำหนดความสว่างของแต่ละสี ใช้คำสั่ง analogWrite() ในการกำหนดค่า - กำหนดสมาชิก instance members ตามความจำเป็น เช่น ค่า duty cycles สำหรับแต่ละสี
- ใช้คลาสดังกล่าวในการเขียนโค้ด (สร้าง object จากคลาสดังกล่าวและเรียกใช้เมธอด) เพื่อสาธิตการทำงานร่วมกับฮาร์ดแวร์จริง
- เมื่อกดปุ่ม R, G หรือ B แล้วปล่อยแต่ละครั้ง จะทำให้ค่า duty cycle ของสีดังกล่าวเพิ่มขึ้นทีละ 8 ถ้าค่า duty cycle เกิน 255 ให้วนกลับมาเริ่มที่ 0 ใหม่ (ค่าเริ่มต้นสำหรับ duty cycles เป็น 0)
- เมื่อกดปุ่ม R, G หรือ B ค้างไว้อย่างน้อย 100 msec จะเพิ่มค่าขึ้นทีละ 8 (แล้วเริ่มนับเวลาใหม่) ถ้าค่า duty cycle เกิน 255 ให้วนกลับมาเริ่มที่ 0 ใหม่
อุปกรณ์ทดลอง (Apparatus)
อุปกรณ์
|
จำนวน
|
|
 |
RGB LED 5mm.
(Anode) |
1
|
 |
ตัวต้านทาน 330 โอห์ม
(ส้ม ส้ม น้ำตาล ทอง)
|
6
|
 |
BREADBOARD
บอร์ดทดลองอิเล็กทรอนิกส์
|
1
|
 |
Arduino Uno R3
|
1
|
 |
ปุ่มกด
|
3
|
 |
สาย USB Cable
|
1
|
 |
สายไฟต่อวงจร
|
-
|
ผังวงจร (Breadboard Layout)
 |
| ผังวงจร |
 |
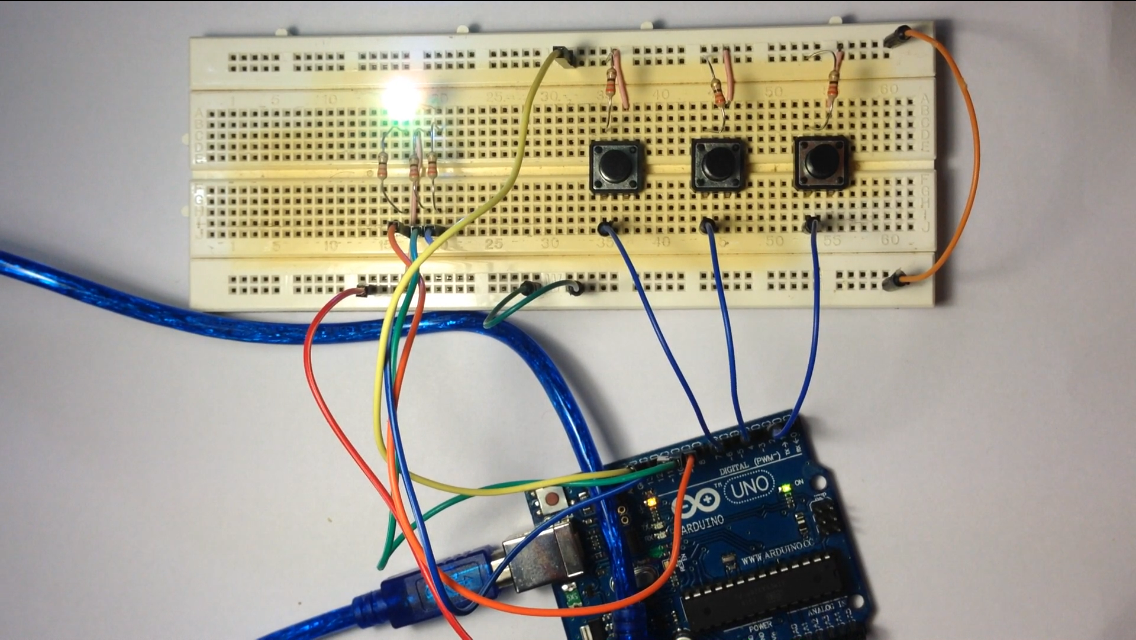
| รูปภาพจากการต่อวงจรจริง |
Arduino Sketch
class RGB_LED{
public:
//constructor
RGB_LED( int red_pin, int green_pin, int blue_pin );
//variable
int duty_red,duty_blue,duty_green,_R,_G,_B;
//methode
void setRed(int duty_cycle);
void setGreen(int duty_cycle);
void setBlue(int duty_cycle);
};
RGB_LED::RGB_LED( int red_pin, int green_pin, int blue_pin ){
duty_red = 255;
duty_blue = 255;
duty_green = 255;
_R = red_pin;
_G = green_pin;
_B = blue_pin;
pinMode(_R,OUTPUT); // use as output
pinMode(_G,OUTPUT); // use as output
pinMode(_B,OUTPUT); // use as output
}
void RGB_LED :: setRed(int duty_cycle){
duty_red = duty_cycle;
duty_red -= 8;
if(duty_red<0){
duty_red = 255;
}
analogWrite(_R,duty_red);
analogWrite(_G,duty_green);
analogWrite(_B,duty_blue);
}
void RGB_LED :: setGreen(int duty_cycle){
duty_green = duty_cycle;
duty_green -= 8;
if(duty_green<0){
duty_green = 255;
}
analogWrite(_R,duty_red);
analogWrite(_G,duty_green);
analogWrite(_B,duty_blue);
}
void RGB_LED :: setBlue(int duty_cycle){
duty_blue = duty_cycle;
duty_blue -= 8;
if(duty_blue <0){
duty_blue = 255;
}
analogWrite(_R,duty_red);
analogWrite(_G,duty_green);
analogWrite(_B,duty_blue);
}
|
RGB_LED led = RGB_LED(9,10,11); //call class RGB_LED
const int R = 2; // input of button red
const int G = 4; // input of button green
const int B = 7; // input of button blue
int a=0;
int b=0;
int c=0;
int red_State = 1;
int green_State = 1;
int blue_State = 1;
void setup(){
pinMode(R,INPUT);
pinMode(G,INPUT);
pinMode(B,INPUT);
}
void loop(){
red_State = digitalRead(R);
green_State = digitalRead(G);
blue_State = digitalRead(B);
// button_red
if(red_State == LOW){ //active-low
a = 1;
}
if(green_State == LOW){ //active-low
b = 1;
}
if(blue_State == LOW){ //active-low
c = 1;
}
if(a == 1 && red_State == HIGH){
a = 0;
led.setRed(led.duty_red);
}else if(b == 1 && green_State == HIGH){
b = 0;
led.setGreen(led.duty_green);
}else if(c == 1 && blue_State == HIGH){
c = 0;
led.setBlue(led.duty_blue);
}
}
|
โดยประกาศ object ของคลาส RGB_LED และกำหนดค่าคงที่ซึ่งใช้เป็น input ในการรับเข้ามา และกำหนดค่าต่างๆที่ใช้ในcode ด้วย สำหรับ void setup() เป็นการกำหนดให้เป็น input ของวงจร ส่วน void loop() เป็นการกำหนดให้มีการกดปุ่มแล้วปล่อยถึงจะทำการเพิ่มสีของขานั้นๆ
ผลการทดลองข้อ1
ข้อ2 : โค้ด Arduino สำหรับ เมื่อกดปุ่ม R, G หรือ B ค้างไว้อย่างน้อย 100 msec จะเพิ่มค่าขึ้นทีละ 8 (แล้วเริ่มนับเวลาใหม่) ถ้าค่า duty cycle เกิน 255 ให้วนกลับมาเริ่มที่ 0 ใหม่
RGB_LED led = RGB_LED(9,10,11);
const int R = 2; // input of button red const int G = 4; // input of button green const int B = 7; // input of button blue int a=0; int b=0; int c=0; int red_State = 1; int green_State = 1; int blue_State = 1; unsigned long time00,time01,time10,time11,time20,time21; void setup(){ pinMode(R,INPUT); pinMode(G,INPUT); pinMode(B,INPUT); Serial.begin(9600); } void loop(){ red_State = digitalRead(R); green_State = digitalRead(G); blue_State = digitalRead(B); // button_red if(red_State == LOW){ //active-low time01=millis(); if(a == 0){ time00 = time01; a = 1; } if(time01-time00 >= 100 ){ led.setRed(led.duty_red); Serial.println(time01); time00 = 0; } } if(green_State == LOW){ //active-low time11=millis(); if(b == 0){ time10 = time11; b = 1; } if(time11-time10 >= 100 ){ led.setGreen(led.duty_green); Serial.println(time11); time10 = 0; } } if(blue_State == LOW){ //active-low time21=millis(); if(c == 0){ time20 = time21; c = 1; } if(time21-time20 >= 100 ){ led.setBlue(led.duty_blue); Serial.println(time21); time20 = 0; } } } |
มีการเปลี่ยนแปลง code จากข้อ 1 แค่ในส่วนที่ไม่ใช่ class เท่านั้น ดังนี้ ใช้ millis() ในการแสดงค่าของเวลาในช่วงที่กดปุ่ม แล้วเช็คไปเรื่อยๆว่าปุ่มนั้นๆมีการกดเกิน 100 ms หรือยัง ถ้าเกินแล้ว ก็จะให้แสดงไฟในขานั้นๆสว่างมากขึ้น
ผลการทดลองข้อ2
ทฤษฎี (Theory)
Pulse Width Modulation (PWM) เป็นเทคนิคในการควบคุมกำลังไฟฟ้า เป็นสัญญาณดิจิตอลแบบมีคาบ ในที่นี้ใช้ควบคุมความสว่างของหลอดไฟ แผนภาพด้านล่างแสดงให้เห็นสัญญาณ PWM ใน arduino
 |
| รูปจาก : https://learn.adafruit.com/adafruit-arduino-lesson-3-rgb-leds/theory-pwm |
ทุกๆ 1/500 วินาที สัญญาณเอาต์พุท PWM จะสร้างสัญญาณพัลส์ ซึ่งความกว้างของสัญญาณพัลส์นี้จะถูกควบคุมโดยฟังก์ชัน "analogWrite" ดังนั้น "analogWrite(0)" จะไม่สร้างสัญญาณพัลส์ มีค่าลอจิกเป็น LOW และ "analogWrite(255)" จะสร้างสัญญาณพัลส์ที่มีค่าลอจิกเป็น HIGH ตลอดสัญญาณ
ต้องกำหนดค่าใน analogWrite เป็นค่าตั้งแต่ 0 ถึง 255 จึงจะสร้างสัญญาณพัลส์ได้
ความถี่ 1 Hz หทายถึง สัญญาณ Pulse 1 ลูก ในเวลา 1 วินาที ฉะนั้น ความถี่ 100 Hz ก็คือ สัญญาณ Pulse 100 ลูก ในเวลา 1 วินาที
แหล่งที่มา
https://learn.adafruit.com/adafruit-arduino-lesson-3-rgb-leds/theory-pwmhttp://www.ee.kmutnb.ac.th/eerobot/esl/learning/index.php?article=arduino-cplusplus-class&start=60




{kind=link}